La decomposizione dei valori singolari (SVD) di una matrice è una fattorizzazione di quella matrice in tre matrici. Ha alcune proprietà algebriche interessanti e fornisce importanti intuizioni geometriche e teoriche sulle trasformazioni lineari. Ha anche alcune importanti applicazioni nella scienza dei dati. In questo articolo cercherò di spiegare l’intuizione matematica dietro SVD e il suo significato geometrico.
Matematica dietro SVD:
L'SVD della matrice mxn A è dato dalla formula 
Dove:
- IN: mxm matrice degli autovettori ortonormali di
 .
. - INT: trasposizione di a nxn matrice contenente gli autovettori ortonormali di
 .
. -
 : matrice diagonale con r elementi pari alla radice degli autovalori positivi di AAᵀ o Aᵀ A (entrambe le matrici hanno comunque gli stessi autovalori positivi).
: matrice diagonale con r elementi pari alla radice degli autovalori positivi di AAᵀ o Aᵀ A (entrambe le matrici hanno comunque gli stessi autovalori positivi).



Esempi
- Trova l'SVD per la matrice A =

- Per calcolare l'SVD, innanzitutto dobbiamo calcolare i valori singolari trovando gli autovalori di AA^{T}.


- L'equazione caratteristica per la matrice sopra è:



hashmap in Java
quindi i nostri valori singolari sono: 
- Ora troviamo i vettori singolari destri, ovvero l'insieme ortonormale di autovettori di ATA. Gli autovalori di ATA sono 25, 9 e 0, e poiché ATA è simmetrico, sappiamo che gli autovettori saranno ortogonali.
Per 

che può essere ridotto per riga a:

Un vettore unitario nella sua direzione è:

Allo stesso modo, per lambda = 9, l'autovettore è:

Per il 3° autovettore, potremmo utilizzare la proprietà che è perpendicolare a v1 e v2 tale che:

come convertire una stringa in intero in Java
Risolvere l'equazione precedente per generare il terzo autovettore

cosa è awt
Ora calcoliamo U utilizzando la formula u_i = frac{1}{sigma} A v_i e questo dà U =  . Quindi, la nostra equazione SVD finale diventa:
. Quindi, la nostra equazione SVD finale diventa:

Applicazioni
- Calcolo dello pseudo-inverso: La pseudo inversa o inversa di Moore-Penrose è la generalizzazione della matrice inversa che potrebbe non essere invertibile (come le matrici di basso rango). Se la matrice è invertibile, la sua inversa sarà uguale a Pseudo inversa ma esiste una pseudo inversa per la matrice che non è invertibile. È indicato con A+.
Suppose, we need to calculate the pseudo-inverse of a matrix M: Then, the SVD of M can be given as: Multiply both sides by M^{-1}.Multiply both side by V:Multiply by W^{-1}Since the W is the singular matrix, the inverse of W is Multiply by>L'equazione precedente fornisce lo pseudo-inverso.
Risolvere un insieme di equazioni lineari omogenee (Mx =b): se b=0, calcola SVD e prendi qualsiasi colonna di VTassociato ad un valore singolare (in IN ) pari a 0.
If , Multiply by>
Dallo pseudo-inverso, lo sappiamo 
Quindi,

- Rango, intervallo e spazio nullo:
- Il rango della matrice M può essere calcolato da SVD in base al numero di valori singolari diversi da zero.
- L'intervallo della matrice M è I vettori singolari di sinistra di U corrispondenti ai valori singolari diversi da zero.
- Lo spazio nullo della matrice M è I vettori singolari destri di V corrispondenti ai valori singolari azzerati.

- Problema di adattamento della curva: La scomposizione dei valori singolari può essere utilizzata per ridurre al minimo l'errore minimo quadrato. Utilizza lo pseudo inverso per approssimarlo.
- Oltre all'applicazione di cui sopra, la decomposizione dei valori singolari e la pseudo-inversa possono essere utilizzate anche nell'elaborazione del segnale digitale e nell'elaborazione delle immagini
Implementazione:
In questo codice proveremo a calcolare la scomposizione del valore singolare utilizzando Numpy e Scipy. Calcoleremo la SVD ed eseguiremo anche la pseudo-inversa. Alla fine, possiamo applicare SVD per comprimere l'immagine
Python3
# Imports> from> skimage.color>import> rgb2gray> from> skimage>import> data> import> matplotlib.pyplot as plt> import> numpy as np> from> scipy.linalg>import> svd> '''> Singular Value Decomposition> '''> # define a matrix> X>=> np.array([[>3>,>3>,>2>], [>2>,>3>,>->2>]])> print>(X)> # perform SVD> U, singular, V_transpose>=> svd(X)> # print different components> print>(>'U: '>, U)> print>(>'Singular array'>, singular)> print>(>'V^{T}'>, V_transpose)> '''> Calculate Pseudo inverse> '''> # inverse of singular matrix is just the reciprocal of each element> singular_inv>=> 1.0> /> singular> # create m x n matrix of zeroes and put singular values in it> s_inv>=> np.zeros(X.shape)> s_inv[>0>][>0>]>=> singular_inv[>0>]> s_inv[>1>][>1>]>=> singular_inv[>1>]> # calculate pseudoinverse> M>=> np.dot(np.dot(V_transpose.T, s_inv.T), U.T)> print>(M)> '''> SVD on image compression> '''> cat>=> data.chelsea()> plt.imshow(cat)> # convert to grayscale> gray_cat>=> rgb2gray(cat)> # calculate the SVD and plot the image> U, S, V_T>=> svd(gray_cat, full_matrices>=>False>)> S>=> np.diag(S)> fig, ax>=> plt.subplots(>5>,>2>, figsize>=>(>8>,>20>))> curr_fig>=> 0> for> r>in> [>5>,>10>,>70>,>100>,>200>]:> >cat_approx>=> U[:, :r] @ S[>0>:r, :r] @ V_T[:r, :]> >ax[curr_fig][>0>].imshow(cat_approx, cmap>=>'gray'>)> >ax[curr_fig][>0>].set_title(>'k = '>+>str>(r))> >ax[curr_fig,>0>].axis(>'off'>)> >ax[curr_fig][>1>].set_title(>'Original Image'>)> >ax[curr_fig][>1>].imshow(gray_cat, cmap>=>'gray'>)> >ax[curr_fig,>1>].axis(>'off'>)> >curr_fig>+>=> 1> plt.show()> |
>
>
Produzione:
[[ 3 3 2] [ 2 3 -2]] --------------------------- U: [[-0.7815437 -0.6238505] [-0.6238505 0.7815437]] --------------------------- Singular array [5.54801894 2.86696457] --------------------------- V^{T} [[-0.64749817 -0.7599438 -0.05684667] [-0.10759258 0.16501062 -0.9804057 ] [-0.75443354 0.62869461 0.18860838]] -------------------------- # Inverse array([[ 0.11462451, 0.04347826], [ 0.07114625, 0.13043478], [ 0.22134387, -0.26086957]]) ---------------------------> 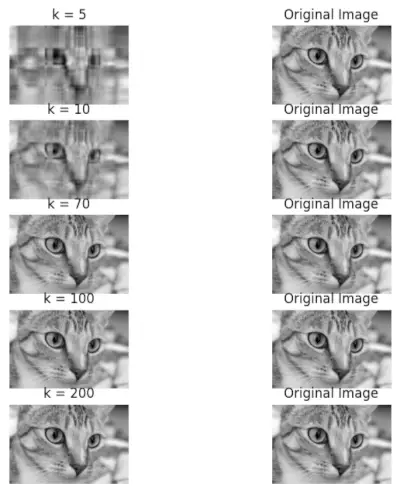
Immagine k originale vs SVD